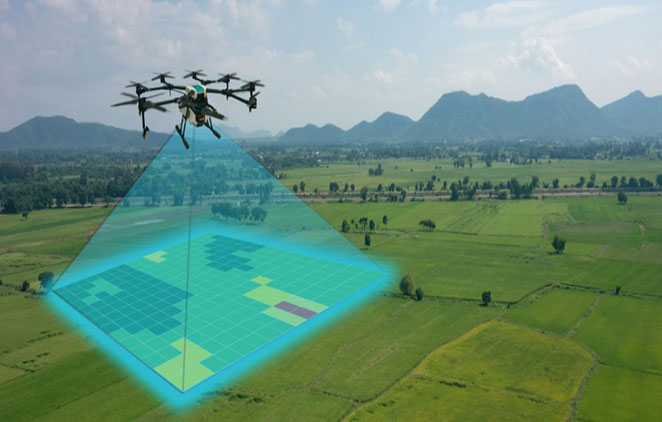
نقشه برداری پهپاد یک فناوری سنجش از دور برای ایجاد نقشه های دو بعدی و سه بعدی از یک منطقه با استفاده از داده های حسگرهای نصب شده بر روی یک پهپاد یا یک وسیله نقلیه هوایی بدون سرنشین (UAV) است. نقشههای به دست آمده معمولاً نقشههای مکانی هستند که مختصات مکان واقعی در هر نقطه داده را دارند. داده های نقشه جاسازی شده شما را قادر می سازد تا اندازه گیری های دنیای واقعی را برای کاربردهایی مانند نقشه برداری زمین، ساخت و ساز، کشاورزی و برنامه ریزی شهری انجام دهید. ما در این مطلب به مبحث نقشه برداری پهپادها میپردازیم. جهت خرید و اطلاع از قیمت انواع دوربین توتال استیشن ،Gps GNSS جی پی اس، دوربین ترازیاب (نیوو) ، پهپاد نقشه برداری ، تجهیزات جانبی نقشه برداری ، تراز لیزری ، متر لیزری ، جی پی اس دستی گارمین میتوانید با کارشناسان شرکت و فروشگاه تجهیزات نقشه برداری دیاکو تجهیز پرگاس تماس بگیرید.
نقشه برداری هواپیماهای بدون سرنشین به سه جزء نیاز دارد:
- پهپاد یا پهپاد : پهپادها را می توان به صورت دستی کنترل کرد یا می توانند به طور مستقل بالای منطقه مورد مطالعه پرواز کنند.
- پهپادهای کنترل شده دستی از طریق یک کنترل از راه دور که از پروتکل های ارتباطی مانند MAVlink استفاده می کند، از یک ایستگاه زمینی کنترل می شوند.
- پهپادهای خودمختار می توانند بدون خلبان در بالای منطقه مورد مطالعه پرواز و مانور دهند و داده ها را برای نقشه برداری هواپیماهای بدون سرنشین جمع آوری کنند.
- حسگرهای پهپاد : حسگرهایی که برای نقشه برداری پهپادها روی پهپادها نصب می شوند، معمولاً ترکیبی از دوربین ها و حسگرهای لیدار هستند.
- دوربین ها به صورت متوالی تصاویر همپوشانی را ثبت می کنند. دوربین هایی که بیشتر مورد استفاده قرار می گیرند عبارتند از:
- دوربین های تصویر مرئی، که دوربین های معمولی هستند که تصاویر بصری (از طیف نور مرئی) را که به صورت RGB نشان داده می شوند، می گیرند. اینها رایج ترین دوربین هایی هستند که برای نقشه برداری هواپیماهای بدون سرنشین استفاده می شوند.
- دوربین های تصویربرداری طیفی که از طیف نور مرئی و نامرئی عکس می گیرند. تصاویر می توانند چند طیفی با سه تا 15 باند باشند یا می توانند ابرطیفی با صدها باند که به صورت مکعب داده نمایش داده می شوند.
- حسگرهای Lidar دادههای ابر نقطهای را با استفاده از Lidar یا «تشخیص و محدوده نور» میگیرند.
- فتوگرامتری : برای نقشه برداری هواپیماهای بدون سرنشین با دوربین، می توان تصاویر گرفته شده را بر اساس نواحی همپوشان به هم دوخت تا مدلی سه بعدی از منطقه ایجاد شود. به این روش فتوگرامتری می گویند.نرمافزار نقشهبرداری : نرمافزار نقشهبرداری هواپیمای بدون سرنشین دادههای جمعآوریشده از حسگرها را پردازش میکند تا ویژگیها را از دادههای متوالی استخراج و مطابقت دهد و آنها را به هم بچسباند تا نقشههای سهبعدی منطقه ایجاد کند. بر اساس حسگرها، دو فرآیند رایج برای نقشه برداری هواپیماهای بدون سرنشین عبارتند از:
- دوربین ها به صورت متوالی تصاویر همپوشانی را ثبت می کنند. دوربین هایی که بیشتر مورد استفاده قرار می گیرند عبارتند از:
فتوگرامتری به دلیل در دسترس بودن زیاد دوربین ها ارزان تر و آسان تر است. با این حال، به شدت به قابلیت مشاهده ویژگی ها از داده های دوربین بستگی دارد. دید تحت تاثیر ارتفاعی که پهپاد در آن در حال حرکت است و جنبه های محیطی مانند تاریکی، ابرها و مه است.
MATLAB همچنین محیط های شبیه سازی شده ای را فراهم می کند که می توانید داده های مصنوعی دوربین و لیدار را برای آزمایش الگوریتم های نقشه برداری پهپاد خود قبل از استقرار آنها در دنیای واقعی ایجاد کنید. همچنین می توانید با نرم افزار ایستگاه زمینی خارجی مانند QGC وصل شوید و با خلبان های خودکار مانند PX4® با استفاده از جعبه ابزار پهپاد ارتباط برقرار کنید .
این گردش کار مراحل استفاده از نقشه برداری فتوگرامتری/لیدار برای ایجاد نقشه های سه بعدی از حسگرهای نصب شده بر روی پهپاد را نشان می دهد.
- جمع آوری داده ها: نقشه برداری هواپیماهای بدون سرنشین با جمع آوری داده های مورد نظر به صورت متوالی با پرواز پهپاد در بالای منطقه مورد مطالعه آغاز می شود.
- پیش پردازش داده ها: هنگامی که داده ها ضبط می شوند، می توانید از MATLAB برای پیش پردازش تصویر یا داده های لیدار برای آماده سازی آن برای تولید نقشه استفاده کنید. این شامل روش هایی مانند حذف نویز و نمونه برداری پایین است .
- تولید نقشه: پس از پیش پردازش، داده ها را به هم متصل می کنید تا یک نقشه سه بعدی از منطقه ایجاد کنید. این مرحله معمولاً از ویژگیهای مشترک از ناحیه همپوشانی دو نقطه داده متوالی برای یافتن تبدیل بین آنها برای دوخت استفاده میکند.
- بهینهسازی گراف پوس: اگر حلقههای بسته در مسیر پهپاد وجود داشته باشد، میتوانید بهینهسازی گراف پوز (16:21) را برای بهبود دقت نقشه سهبعدی ایجاد شده پیادهسازی کنید.
خرید انواع دوربین توتال استیشن ،Gps GNSS جی پی اس، دوربین ترازیاب (نیوو) ، پهپاد نقشه برداری ، تجهیزات جانبی نقشه برداری ، تراز لیزری ، متر لیزری ، جی پی اس دستی گارمین در شرکت و فروشگاه تجهیزات نقشه برداری دیاکو تجهیز پرگاس
جهت خرید و اطلاع از قیمت انواع دوربین توتال استیشن ،Gps GNSS جی پی اس، دوربین ترازیاب (نیوو) ، پهپاد نقشه برداری ، تجهیزات جانبی نقشه برداری ، تراز لیزری ، متر لیزری ، جی پی اس دستی گارمین میتوانید با کارشناسان شرکت و فروشگاه تجهیزات نقشه برداری دیاکو تجهیز پرگاس تماس بگیرید.
ارتباط با ما
شماره تماس: 09021116149
شماره ثابت: 02165361614
واتساپ: 09333769950
آدرس:تهران – اندیشه فاز4 (شهریار) – بازار بزرگ ایرانی اسلامی اندیشه – ورودی سرای مولانا – دیاکو تجهیز پرگاس
خرید انواع دوربین توتال استیشن ،Gps GNSS جی پی اس، دوربین ترازیاب (نیوو) ، پهپاد نقشه برداری ، تجهیزات جانبی نقشه برداری ، تراز لیزری ، متر لیزری ، جی پی اس دستی گارمین در شرکت و فروشگاه تجهیزات نقشه برداری دیاکو تجهیز پرگاس – دوربین ترازیاب